|
|

|

|
| e-Pub |
Section: New Results
Neuroprostheses and technology
Fast simulation and optimization tool to explore selective neural stimulation
Participants : Mélissa Dali, Olivier Rossel, David Guiraud.
In functional electrical stimulation, selective stimulation of axons is desirable to activate a specific target, in particular muscular function. This implies to simulate a fascicule without activating neighboring ones i.e. to be spatially selective. Spatial selectivity is achieved by the use of multicontact cuff electrodes over which the stimulation current is distributed. Because of the large number of parameters involved, numerical simulations provide a way to find and optimize electrode configuration. The present work offers a computation effective scheme and associated tool chain capable of simulating electrode-nerve interface and finds the best spread of current to achieve spatial selectivity. The software is protected to « Agence de Protection des Programmes « (APP), with the name MOS2SENS and identification IDDN.FR.001.490036.000.S.P.2014.000.31230 [21]
|
Numerical simulation of multipolar configuration
Participants : Mélissa Dali, Olivier Rossel, David Guiraud.
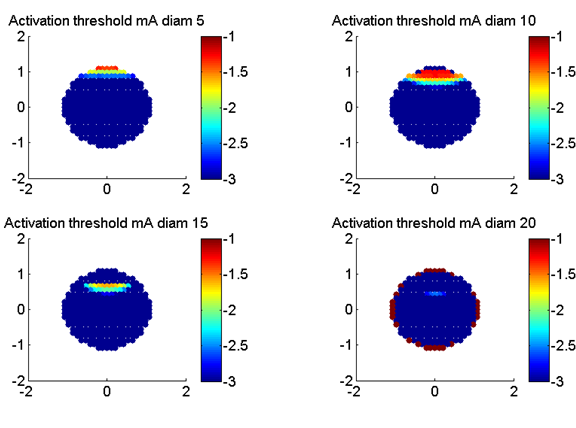
In the context of functional electrical stimulation of peripheral nerves, the control of a specific motor or sensory functions may need selective stimulation to target the desired effect without others. In implanted stimulation, spatial selectivity is obtained using multipolar CUFF electrodes with specific spread of the current over each contact. Furthermore, electrical stimulation recruits large fibers before small ones, whereas the targeted function could be elicited by a specific fiber type i.e. fiber diameter. In our work, numerical simulations were used to investigate the combination of multipolar configuration and prepulses, in order to obtain spatially reverse recruitment order. Multipolar stimulation provides efficient spatial selectivity, whereas subthreshold prepulses were used to reverse recruitment order with a reasonable increase of the injected charges. We compared several selective configurations combined with prepulses to show that some are able to guarantee both the spatial selectivity while one fiber’s diameter can be preferentially activated [42].
Formal validation for critical embedded systems
Participants : Ibrahim Merzoug, Karen Godary-Dejean, David Andreu.
The works addressed here fall under the domain of formal modelling, semantics and verification methods (model checking). We focus on the analysis part of the HILECOP methodology, integrating the specific execution constraints (non-functional properties) into the validation process to guarantee the validation results. Indeed, the state space that is analyzed is that of the model of the system. It is clear that, if we want to obtain confident validation results, this analyzed state space must include all the possible behaviors of the real system, i.e., when it is executed.
One solution has been studied in the PhD thesis of H. Leroux [54], which lays the foundations of translation rules from the designed model to the analyzed model integrating both implementation and execution constraints. These transformations rules allow analyzing the resulting model with classical Petri nets analysis tools (as the Tina toolbox, and to guarantee the inclusion of the real states and traces into the analyzed state space.
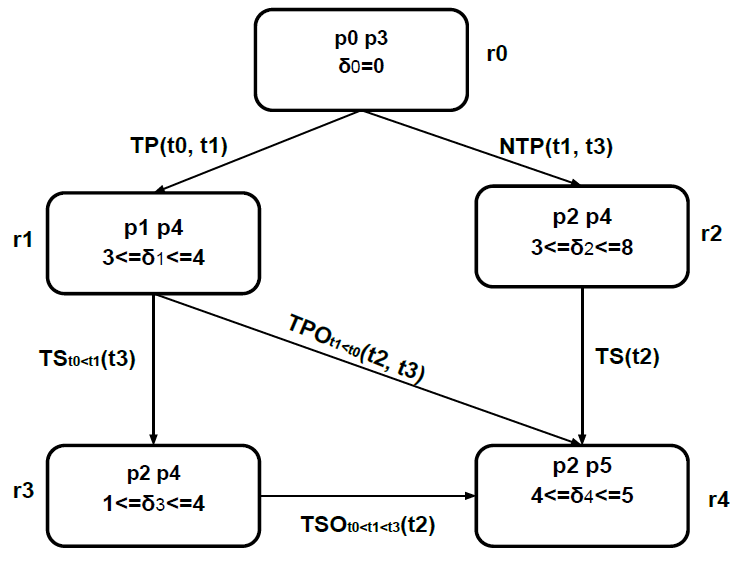
A well-known drawback of such approach is that model checking is a technique that achieves properties verification through an exhaustive analysis of the state graph of the system model. The main limitation of this technique is the state space explosion problem because of its intrinsic exhaustivity. In a first part of the thesis (2015-2016), we proposed a compact state graph, called the Reduced Graph (see figure 25), which preserves all sequences of transitions firing as well as minimal and maximal duration of each sequence. To do so, we extend the partial order semantics to define temporal parallelism relations. According to covering steps approach, we compute our reduced graph reducing transitions interleaving, while keeping potential parallelism information.
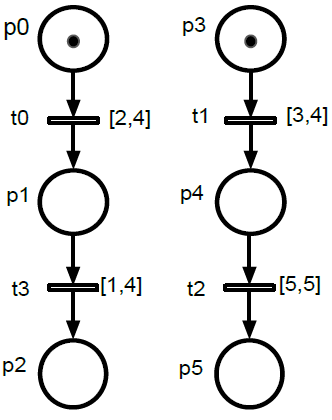
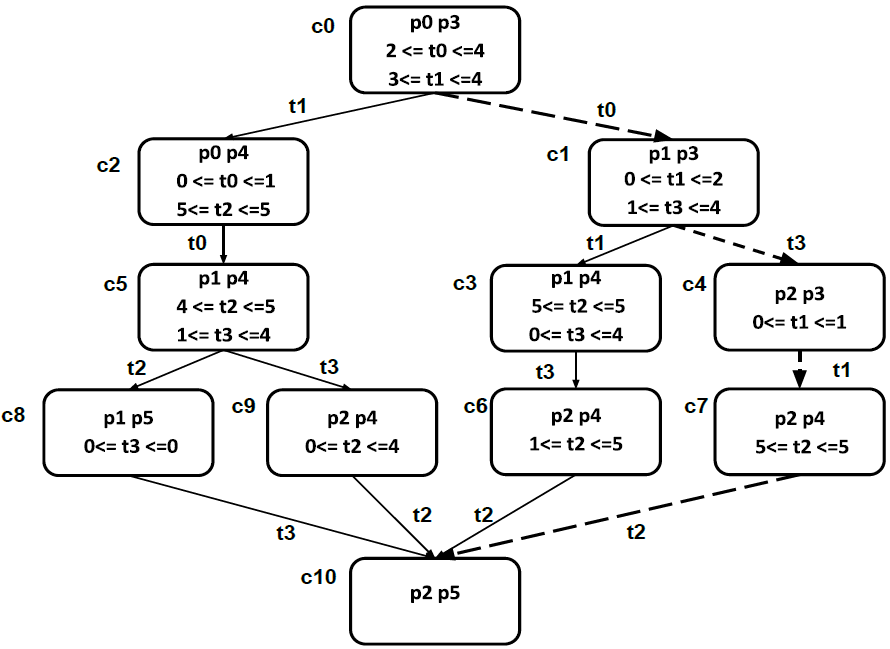
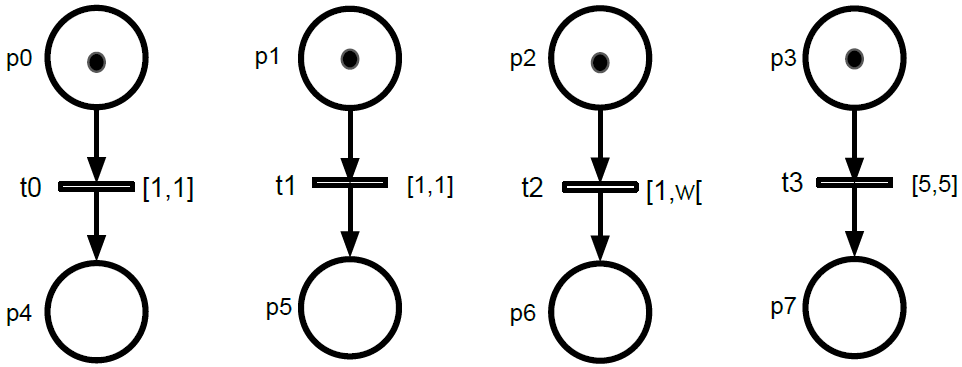
But using classical analysis tools forces to analyze an over-set of the real behaviors, which limits the analytical capacities. In particular, the classical semantics of Petri nets considers an asynchronous execution, while in our context they are synchronously executed on FPGA with real parallelism and clock synchronization. Thus, we propose a new states graph which takes into account all the implementation and execution constraints related to the target hardware (non-functional properties): the Synchronous Behaviour Graph (SBG). We formally defined the graph and its semantics, illustrating this method on a simple example (see Figure 26). Then, we apply our method on a real industrial model, which is the execution engine embedded in our neurostimulator.

Control and scheduling co-design for stimulation systems
Participants : Daniel Simon, Zineddine Djellouli, David Andreu.
Functional Electrical Stimulation (FES) is used in therapy for rehabilitation or substitution for disabled people. They are control systems using electrodes to interface a digital control system with livings. Hence the whole system gathers continuous-time (muscles and nerves) and discrete-time (controllers and communication links) components. During the design process, realistic simulation remains a precious tool ahead of real experiments to check without danger that the implementation matches the functional and safety requirements [14]. To this aim a real-time open hybrid simulation software has been developed. It is dedicated to the analysis of FES systems deployed over distributed execution resources and wireless links. The simulation tool is especially devoted to the joint design and analysis of control loops and real-time features [6].
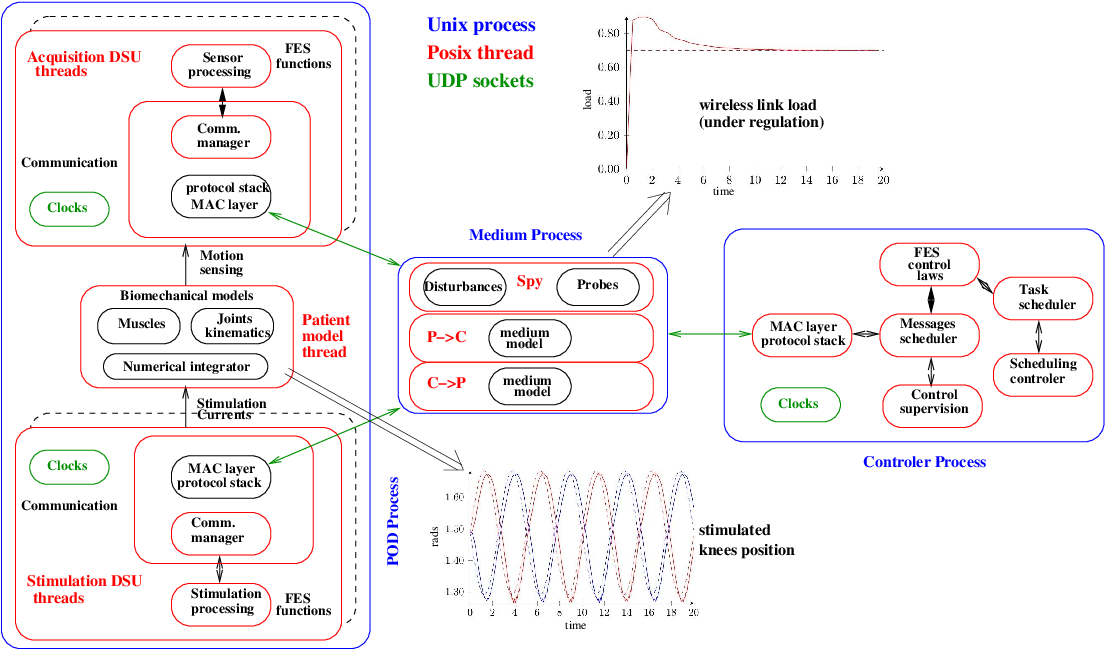
Such simulator can be used for the design, testing and preliminary validation of new technologies and implementation. For example, it has been used to evaluate extensions of the STIMAP wireless communication protocol to optimize the network bandwidth when using multiple stimulation sites and control loops. Thanks to the hybrid nature of the simulation tool, the effect of the enhanced protocol can be directly observed on the controller output (e.g., concurrent controllers running to control several joints).
Another use is for the evaluation of closed-loop controllers acting on the execution resources of the distributed system. This approach provides adaptability and robustness, allowing for the design of fault-tolerant systems against varying and uncertain operating conditions [48]. It is especially usefull for embedded systems where these resources are scarce and fragile, as for the limited bandwith of wireless links between controllers and stimulation probes. Hence, a simple PI controller has been applied to the (m,k)-firm scheduling policy of control messages sent over the wireless link between the control device and the stimulation probes. It has been observed that such simple scheduling controller is able to jointly regulate both the communication load and the joints control quality.